Intro
In this tutorial, you may learn the overview of image processing framework ion-kit.
ion-kit is an image processing framework which enables to efficiently describe and compile a user-defined image processing pipeline.
The fundamental idea of ion-kit is creating a single pipeline consists of building blocks which deal with image I/O and image processing.
This section focus on ion-kit. If you would like tto know how to use the simple tools to control U3V cameras, please check Tools from Aravis.
Building Block
Usually, image-processing program has three steps: obtain image, processing it, and save/display the processed image.
ion-kit allows us to chain the BBs to create a single pipeline that handles all these steps, and each component element of the pipeline is called Building Block (BB).
Here is some examples of Building blocks:
| Name | Type | Description |
|---|---|---|
image_io_u3v_cameraN_u16x2 | image-io | Obrain 16-bit depth image from U3V camera and send it out as its output |
image_io_u3v_gendc | image-io | Obtain GenDC Container data from U3V camera and send it out as its output |
core_cast_1d_uint16_to_float | core(data-type cast) | Cast 1-D unsigned 16-bit int input data to float type and send it out as its output |
image_processing_bayer_demosaic_linear | image-processing | Reconstruct input bayer image to 3-color channel image and send them out as its output |
image_io_gui_display | image-io | Take an image as input and display it |
image_io_binary_gendc_saver | image-io | Take a GenDC Container data as input and save to binary file |
For example, if you would like to connect a U3V camera to your host machine and would like to display the image stream, you need to create a pipeline consisting of minimum 5 BBs as follows
- image-io: to get image data
- image-processing:
- to normalize the raw-image
- to convert bayer to RGB/BGR
- to adjust white balance
- image-io: to display the image
then execute your pipeline.
Another example, if you would like to save the series of GenDC Container from U3V camera stream, you just need to chain the following BBs
- image-io:
- to get gendc data
- to save gendc data
Port
Each BB has input and output port. They have three properties:
- key (name)
- type
- size (dimension)
Port is either used to 1. connect between BBs or 2. use as pipeline's I/O.
Connection
Building blocks can be connected as long as the previous BB's output port types and dimensions match the ones of the preceding BB's input ports.
The following diagram shows the second example above.
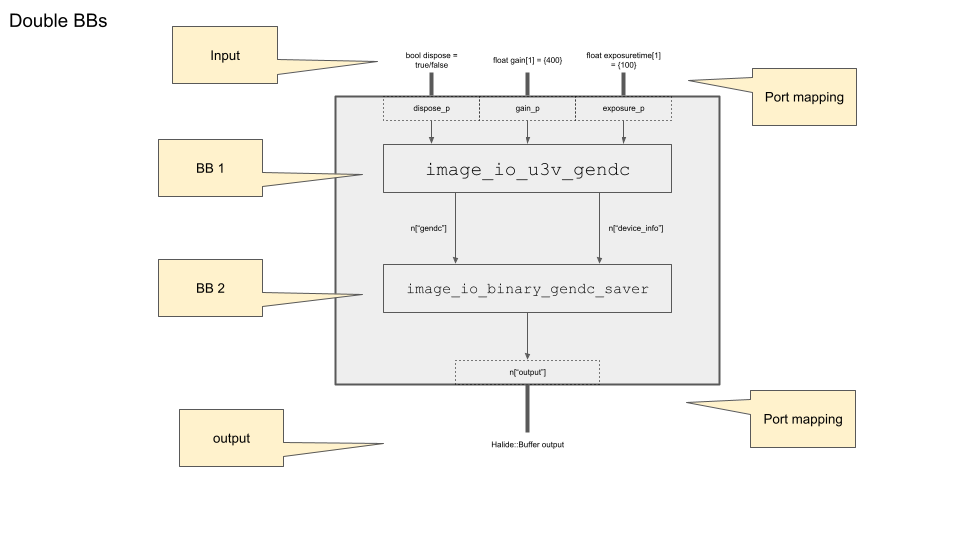
The first BB (image_io_u3v_gendc)'s output is "gendc" and "device_info", both are 1-D uint8 data. Since the successing BB (image_io_binary_gendc_saver) takes two input and both 1-D uint8, the connection works.
Imagine we need to create Directed acyclic graph (DAG) where BB is a node and connections are edges between nodes. Edges are valid only when two nodes output-input have the same dimension/type and there's no isolated node.
Where to start:
Access Divice Info in C++
c++ tutorial code to access and display device info
Display Image in C++
c++ tutorial code to retreive and display the images
Access Divice Info in Python
python tutorial code to access and display device info
Display Image in Python
python tutorial code to retreive and display the images